010 - Nonlinear torsion
3 min read • 465 wordsTest of the Wagner strain term with standard 6-DOF frame elements.
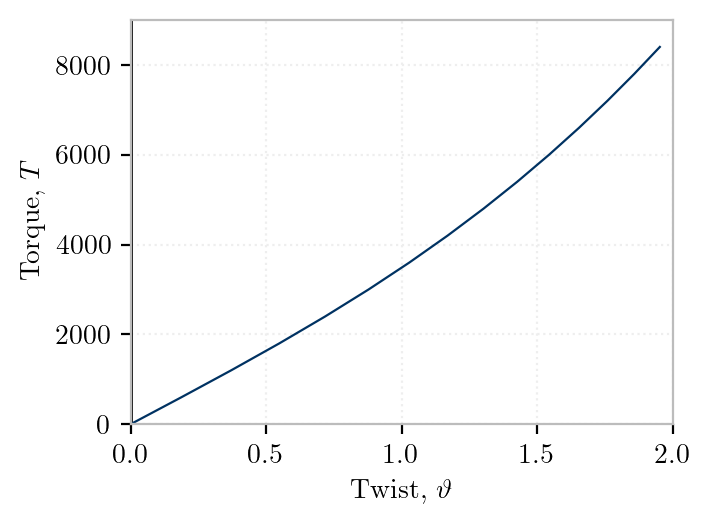
The torque-twist rotation behavior of a cantilever torsion member of narrow rectangular section is shown in Fig. 1. The member has a concentrated torque acting at the righthand end and is prevented from rotating at the left-hand support. The beam properties are , and length .
This beam is in uniform torsion under a constant torque , so that the twist is constant along the member. In this case, Eq. (1) can be solved in closed form as
where twist rotation at the free end.
Rectangle, pure torsion (no instability), unconstrained warping, .
Nonuniform constrained warping was considered by
-
Wen Yi Lin; Kuo Mo Hsiao. (2001). Co-rotational formulation for geometric nonlinear analysis of doubly symmetric thin-walled beams. , 190(45), 6023–6052. doi:10.1016/s0045-7825(01)00212-2
-
@trahair2005nonlinear
-
Battini et al. (2002a), example 7.4
-
@du2021threedimensional
# Test of the Wagner strain term.
# Battini et al. (2002a), Example 7.4
#
import veux
from shps.shapes import Rectangle
import opensees.openseespy as ops
import matplotlib.pyplot as plt
try:
pass
plt.style.use("veux-web")
except:
pass
def create_cantilever(element, section):
d = 10
b = .5
E = 2.1e6 # MPa
v = 0.33 #0.5*E/G - 1
G = 0.5*E/(1+v) # 787500
L = 100
ne = 5 # 20
model = ops.Model(ndm=3, ndf=6)
mat = 1
sec = 1
model.material('ElasticIsotropic', mat, E, v)
shape = Rectangle(d=d, b=b).create_shape()
if section == "Elastic":
cmm = shape.torsion.cmm()
cnn = shape.torsion.cnn()
cnv = shape.torsion.cnv()
cnm = shape.torsion.cnm()
cmw = shape.torsion.cmw()
A = cnn[0,0]
model.section("ElasticFrame", sec,
E=E,
G=G,
A=A,
Ay=1*A,
Az=1*A,
Qy=cnm[0,1],
Qz=cnm[2,0],
Iy=cmm[1,1],
Iz=cmm[2,2],
J =shape.torsion.torsion_constant(),
Ry= cnv[1,0],
Rz=-cnv[2,0],
Sy= cmw[1,0],
Sz=-cmw[2,0]
)
else:
model.section("ShearFiber", 1, GJ=0)
for fiber in shape.fibers():
y, z = fiber.location
model.fiber(y, z, fiber.area, material=mat, warp=[fiber.warp[0], [0,0,0], [0,0,0]], section=1)
model.geomTransf("Linear", 1, (0,0,1))
model.node(0, (0,0,0))
for i in range(ne):
model.node(i+1, ((i+1)*L/ne, 0, 0))
model.element(element, i+1, (i, i+1), section=1, transform=1)
model.fix(0, (1,1,1, 1,1,1))
return model, shape
if __name__ == "__main__":
import os
import sys
model, shape = create_cantilever(
section = os.environ["Section"],
element = os.environ.get("Element", "ExactFrame")
)
end = len(model.getNodeTags()) - 1
# MODEL DONE
artist = veux.create_artist(model, model_config=dict(extrude_outline=shape))
artist.draw_surfaces()
artist.draw_outlines()
# Apply torsional moment
nsteps = 15
Mmax = 9e3
model.pattern("Plain", 1, "Linear")
model.load(end, (0,0,0, 1,0,0), pattern=1)
model.system('Umfpack')
model.integrator("LoadControl", Mmax/nsteps)
model.test("NormDispIncr",1e-8,100,1)
# model.test('NormUnbalance',1e-6,10,1)
model.algorithm("Newton")
model.analysis("Static")
u = []
P = []
while model.getTime() < Mmax:
u.append(model.nodeDisp(end, 4))
P.append(model.getTime())
if model.analyze(1) != 0:
print(f"Failed at time = {model.getTime()}")
break
fig, ax = plt.subplots()
ax.set_xlabel(r"Twist, $\vartheta$")
ax.set_ylabel("Torque, $T$")
ax.set_xlim([0, 2])
ax.set_ylim([0, Mmax])
ax.axvline(0, color='black', linestyle='-', linewidth=1)
ax.axhline(0, color='black', linestyle='-', linewidth=1)
ax.plot(u, P)
plt.show()
# plt.savefig("img/e0010.png")
artist.draw_sections(state=model.nodeDisp)
if len(sys.argv) > 1:
artist.save(sys.argv[1])
else:
veux.serve(artist)