011 - Restrained torsion
3 min read • 476 wordsLinear 7-DOF analysis of a cantilever subjected to a torque.
# Test of the warping DOF
# Linear 7-DOF analysis of a cantilever subjected to a torque
import os
import sys
import veux
from veux.motion import Motion
from shps.shapes import WideFlange
import opensees.openseespy as ops
# External libraries
import numpy as np
import matplotlib.pyplot as plt
try:
plt.style.use("veux-web")
except:
pass
def create_cantilever(case="a", element="ExactFrame", section="Elastic"):
E = 29e3 # ksi
v = 0.30 #0.5*E/G - 1
G = 0.5*E/(1+v) # 11,200 ksi
L = 240
ne = 5 # 20
nen = 2
nn = ne*(nen-1)+1
model = ops.Model(ndm=3, ndf=7)
mat = 1
sec = 1
model.material('ElasticIsotropic', mat, E, v)
shape = WideFlange(
tf = 0.93,
tw = 0.58,
d = 21.62,
b = 8.42,
# saint_venant="linear"
).create_shape()
if section == "Elastic":
cmm = shape.torsion.cmm()
cnn = shape.torsion.cnn()
cnv = shape.torsion.cnv()
cnm = shape.torsion.cnm()
cmw = shape.torsion.cmw()
A = cnn[0,0]
model.section("ElasticFrame", sec,
E=E,
G=G,
A=A,
Ay=1*A,
Az=1*A,
Qy=cnm[0,1],
Qz=cnm[2,0],
Iy=cmm[1,1],
Iz=cmm[2,2],
J =shape.torsion.torsion_constant(),
Ry= cnv[1,0],
Rz=-cnv[2,0],
Sy= cmw[1,0],
Sz=-cmw[2,0]
)
else:
model.section("ShearFiber", 1, GJ=0)
for fiber in shape.fibers():
y, z = fiber.location
model.fiber(y, z, fiber.area, warp=[fiber.warp[0], [0,0,0], [0,0,0]], material=mat, section=1)
model.geomTransf("Linear", 1, (0,0,1))
for i,x in enumerate(np.linspace(0, L, nn)):
model.node(i, (x,0,0))
for i in range(ne):
start = i * (nen - 1)
nodes = list(range(start, start + nen))
model.element(element, i+1, nodes, section=sec, transform=1)
wi = int(case in "cb")
wj = int(case in "c")
print(wi, wj)
model.fix(0, (1,1,1, 1,1,1, wi))
model.fix(nn-1, (0,0,0, 0,0,0, wj))
return model, shape
if __name__ == "__main__":
fig, ax = plt.subplots()
fig2, ax2 = plt.subplots()
speed = 1/10
for case in "abc":
model, shape = create_cantilever(case,
section = os.environ.get("Section", "ShearFiber"),
element = os.environ.get("Element", "ExactFrame"))
end = len(model.getNodeTags()) - 1
# Render
if case == "b":
artist = veux.create_artist(model,
model_config=dict(
extrude_outline=shape,
section_warping=shape.torsion.model.create_handle(shape.torsion.solution())
)
)
# artist.draw_surfaces()
# artist.draw_sections()
# artist.draw_outlines()
motion = Motion(artist)
else:
motion = None
# Apply torsional moment
nsteps = 15
Mmax = 1.2e3
model.pattern("Plain", 1, "Linear")
# model.load(0 , (0,0,0, 0,0,0, -1e-3), pattern=1)
model.load(end, (0,0,0, 1,0,0, 0), pattern=1)
model.system('Umfpack')
model.integrator("LoadControl", Mmax/nsteps)
model.test("NormDispIncr",1e-12,5,1)
# model.test('NormUnbalance',1e-6,10,1)
model.algorithm("Newton")
model.analysis("Static")
u = []
P = []
while model.getTime() < Mmax:
u.append(model.nodeDisp(end, 4))
P.append(model.getTime())
if model.analyze(1) != 0:
print(f"Failed at time = {model.getTime()}")
break
if motion is not None:
motion.advance(time=model.getTime()*speed)
motion.draw_sections(rotation=model.nodeRotation,
position=model.nodeDisp,
)
motion.set_field(lambda tag: model.nodeDisp(tag, 7))
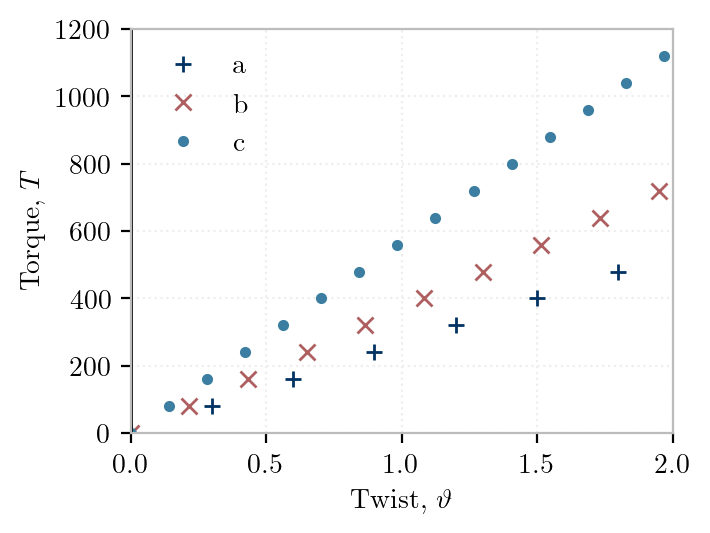
marker = "+x."["abc".index(case)]
ax.plot(u, P, marker, label=case)
ax2.plot(
*zip(*[(model.nodeCoord(node,1), model.nodeDisp(node,4))
for node in model.getNodeTags()]),
marker,
label=case
)
if motion is not None:
motion.add_to(artist.canvas)
if len(sys.argv) > 1:
artist.save(sys.argv[1])
else:
veux.serve(artist)
G = 11.2e3
E = 29e3
J = shape.torsion.torsion_constant()
Cv = shape.torsion.cvv()[0,0]
Cw = shape.torsion.cww()[0,0]
eta = 1+J/Cv
lam = np.sqrt(G*J/(eta*E*Cw))
L = model.nodeCoord(end,1)
x = np.linspace(0,L,100)
aL = L*Mmax/(G*J)
a0 = L*Mmax/(G*J)*(eta - 1)/eta
a = aL*x/L + (a0 - aL)*np.tanh(lam*L)/(lam*L)*(1 - np.sinh(lam*L*(1 - x/L))/np.sinh(lam*L))
ax2.plot(x, a)
ax2.set_xlabel("$x$")
ax2.set_ylabel(r"$\vartheta$")
ax.set_xlabel(r"Twist, $\vartheta$")
ax.set_ylabel("Torque, $T$")
ax.set_xlim([0, 2])
ax.set_ylim([0, Mmax])
ax.axvline(0, color='black', linestyle='-', linewidth=1)
ax.axhline(0, color='black', linestyle='-', linewidth=1)
ax.legend()
ax2.legend()
fig.savefig("img/e0011.png")
plt.show()
# artist.draw_outlines(state=model.nodeDisp)
# veux.serve(artist)