Pure flexure
2 min read • 267 wordsBilinear quadrilateral elements are used to solve the infinitesimal pure bending problem.
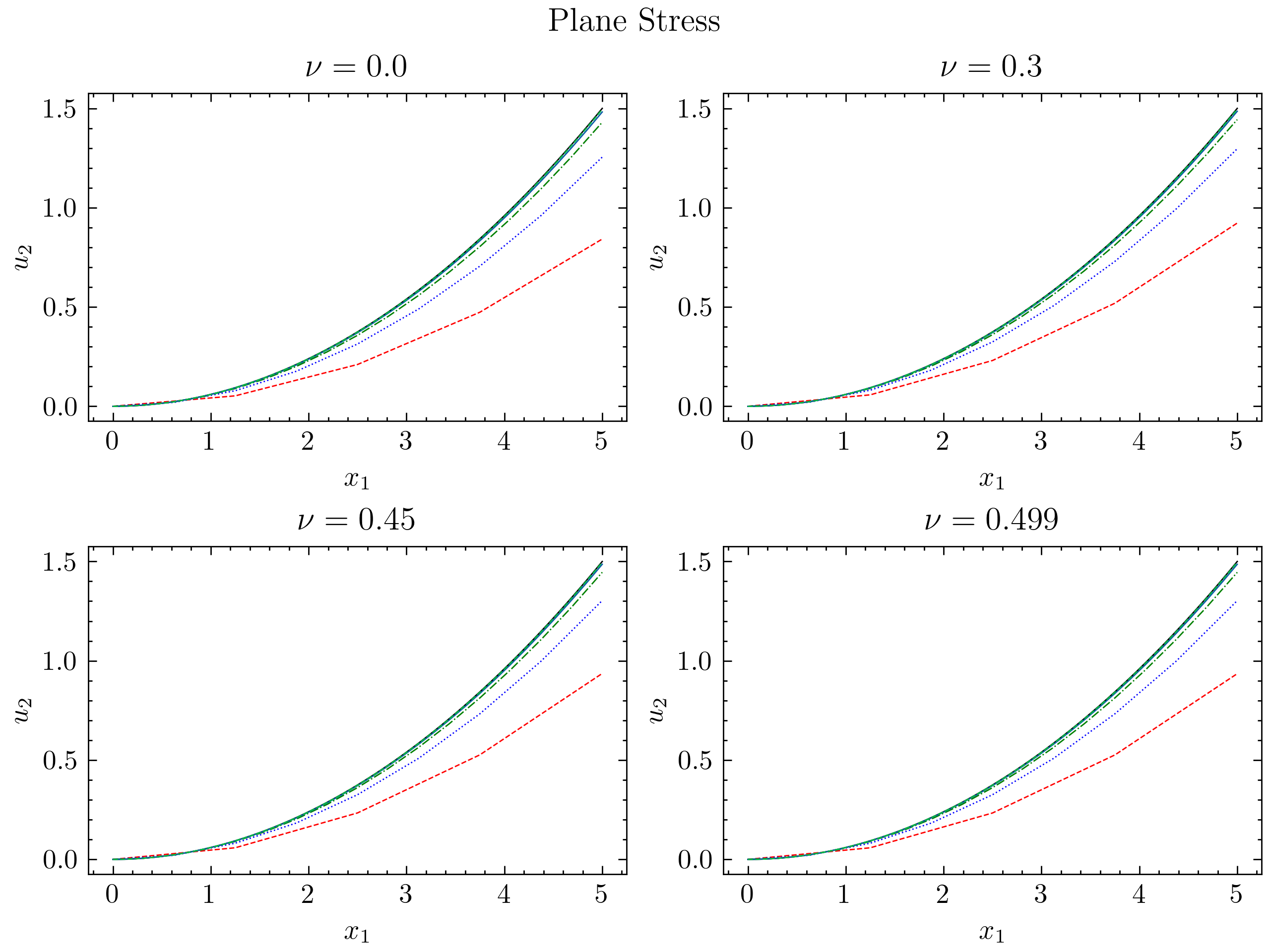
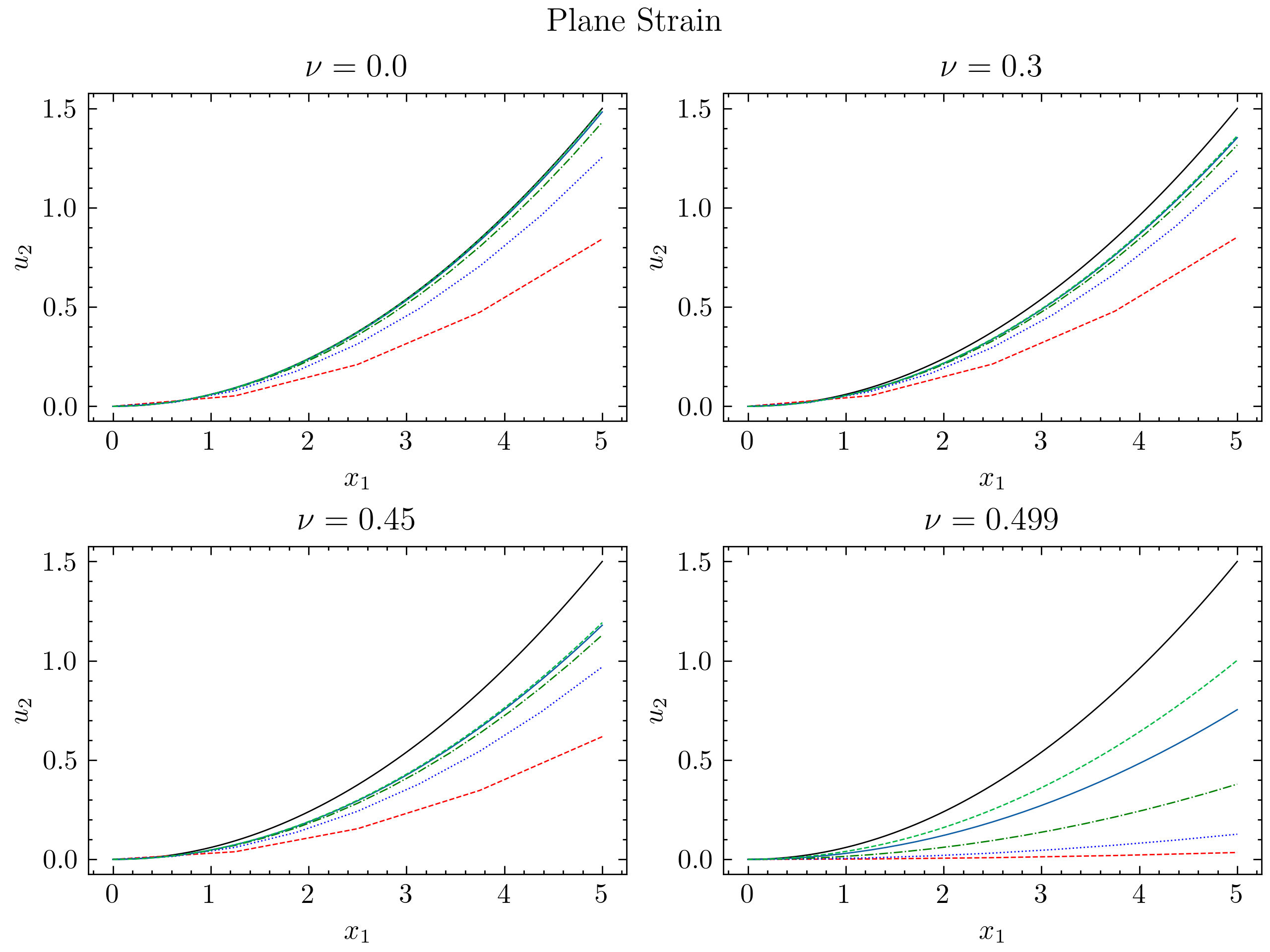
Bilinear quadrilateral elements are used to solve the pure bending problem. For our simulations we’ll consider a beam of depth and length . The left end has the horizontal displacements restrained to zero for all nodes, and the vertical displacement is fixed to zero at the center node only. The right end is to be loaded by a pure bending moment of value 1. Use full quadrature .
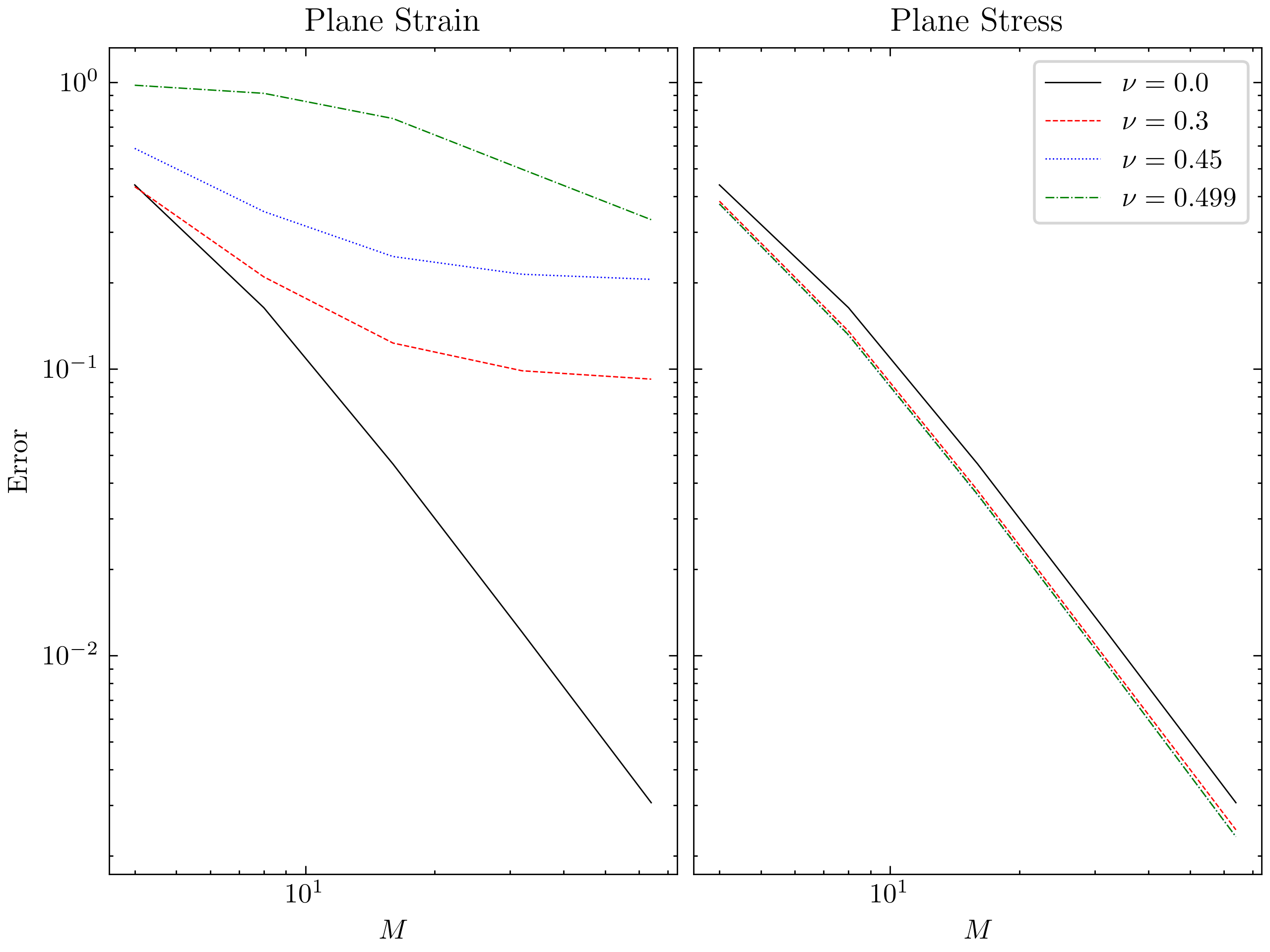
Let and consider values for of , and . For each of these values, perform a convergence analysis with meshes consisting of and elements. Plot the relative error of the tip vertical deflection (middle node of the right end), when compared with the exact solution of the thin-beam theory (note that we consider plane strain conditions), versus the number of elements along the length for each Poisson ratio. You should note the tendency to lock for the higher Poisson ratios.
The exact 3D solution is given by:
with .


Note:
- For this case, both the Euler and Timoshenko theories are equivalent.
- The classical Euler solution to this problem is an exact solution to the continuum mechanics problem, provided transverse strains are not constrained in the plane. This was first shown by Saint Venant in his treatise on Torsion [@timoshenko1983history].
3D Bricks
Plane Strain
Plane Stress