Dynamic Shell Analysis
3 min read • 579 wordsFinite element analysis of a shell model using OpenSees and veux.
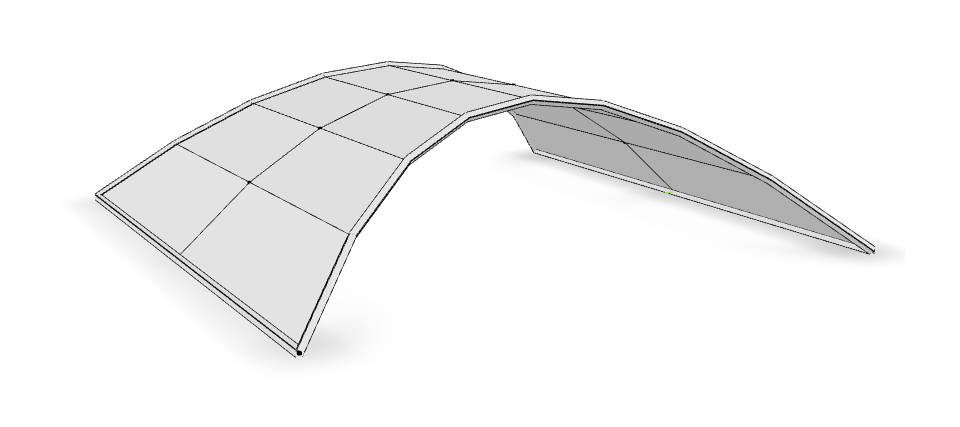
In this example a simple problem in shell dynamics is considered. The structure is a curved hoop shell structure that looks like the roof of a Safeway.
Renderings are created from the script
render.py, which
uses the
veux
Python package.
Modeling
For shell analysis, a typical shell element is defined as a surface in three dimensional space.
Each node of a shell analysis has six degrees
of freedom, three displacements and three rotations. Thus the model is
defined with ndm = 3 and ndf = 6.
The shell element is constructed using the ShellMITC4 formulation.
An elastic membrane-plate material section model is constructed using the section
command and the
"ElasticShell"
formulation.
In this case, the elastic modulus
, Poisson’s ratio
, the thickness
and the mass density per unit volume
A mesh is generated using the
surface()
function. The
number of nodes in the local
-direction of the block is nx and the
number of nodes in the local
-direction of the block is ny.
The surface function generates nodes with tags {1,2,3,4, 5,7,9}.
Boundary conditions are applied using the
fixZ
command. In this case,
all the nodes whose
-coordiate is
have the boundary condition
{1,1,1, 0,1,1}: all degrees-of-freedom are fixed except rotation about
the x-axis, which is free.
The same boundary conditions are applied where the
-coordinate is
.
For initial gravity load analysis, a single load pattern with a linear
time series and three vertical nodal loads are used.
A solution algorithm of type Newton is used for the problem.
Five static load steps are performed.
A scaled rendering of the deformed shape under gravity loading is shown below:
artist = veux.render(model, model.nodeDisp,
canvas="gltf",
scale=200,
reference={"plane.outline"},
displaced={"plane.surface", "plane.outline"},
)
veux.serve(artist)Dynamic Analysis
After the static analysis, the wipeAnalysis and remove loadPatern commands are used to remove the nodal loads and create a new analysis. The nodal displacements have not changed. However, with the external loads removed the structure is no longer in static equilibrium.
The integrator for the dynamic analysis if of type GeneralizedMidpoint
with
. This choice is uconditionally stable and energy
conserving for linear problems. Additionally, this integrator conserves
linear and angular momentum for both linear and non-linear problems. The
dynamic analysis is performed using
time increments with a time
step
.
The results consist of the file Node.out, which contains a line for
every time step. Each line contains the time and the vertical
displacement at the upper center of the hoop structure. The time history
is shown in the figure below.